People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Wed May 05, 2010 9:22 pm
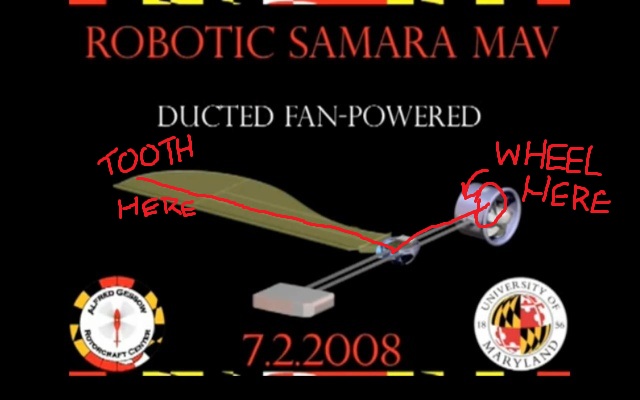
I have a feeling it'll just spin around the tooth on the end there (wheel side moving along circumferential path, tooth remaining stationary). Take a look at these for a potential approach:
A monocopter-like layout might be exactly what the design calls for.
EDIT1: In fact, now I'm going to look into this. The monocopter layout is almost perfect for a one-wheeled melty, and I'm looking to build a 1-lber in the near future.
EDIT2: Another one-wheeled melty test platform
EDIT3: That test platform is for Death By Translation
EDIT4: To make the model you have in the first post work properly, bend it into an L-shape.
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Wed May 05, 2010 10:04 pm
That mono, minus the wing and some small wheels to get it rolling is pretty much the same deal
If you notice in part of the video, while it's on the ground and just starting, it want to do exactly what you say, pivot around the counter weight, but it can't do that for very long, because the assembly wants to rotate around the cg... once the fan gets moving air (which kind of = the wheel picking up speed)
thanks for the link...I actually think that this might work!!!
Let's get more opinions!!! maybe even a poll...lol
Will this thing fly? or be a dud....no biggie if it doesn't
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Wed May 05, 2010 10:07 pm
Jeff...you might be looking at that mono wrong...or maybe I am
It's not an L at all. It's a motor on one end and a counterweight on the other.
The wing is placed so that it can create lift....therefore the wing tilting device to make it rise and fall
the cad above just looks wierd cause it's not the typical flat plate. at speed, the blade shouldn't touch the ground.
Some possible lengthening of the blade or outriggers might be needed to keep the tube from rolling...maybe even a fin...lol
or am I missing the boat?
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Wed May 05, 2010 10:12 pm
No, I mean the torque is being applied the wrong way to spin the whole thing efficiently. That's why I said it has to be bent into an L-shape. Otherwise, I'm 90% sure it'll just spin around its point of contact on the ground (the tooth).
EDIT: consider the tip of the monocopter wing (or in your case, the tooth) as the object you're trying to make zip around in a circle. Your design has a lever-arm/torque-arm of almost zero, while the L-shape should increase that. Another possibility would be to have the center of gravity act as the point defining where the torque arm starts from, but you would need some kind of pivot point (a skid) contacting the floor at that point to ensure that it starts to spin properly.
Last edited by Jeff L on Wed May 05, 2010 10:16 pm; edited 1 time in total
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Wed May 05, 2010 10:14 pm
Jeff L wrote:
No, I mean the torque is being applied the wrong way to spin the whole thing efficiently. That's why I said it has to be bent into an L-shape. Otherwise, I'm 90% sure it'll just spin around its point of contact on the ground (the tooth).
Other more conventional melties would have the same problem, except that the flat plate (bottom would prevent torque roll. Once above a certain speed, and especailly with a cg bias towards the motor end, all melties are off the ground sans the wheel
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Wed May 05, 2010 10:19 pm
Ok, I came to that conclusion in my edit. It's just not very obvious from the model that the CG is offset.
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Wed May 05, 2010 10:34 pm
Jeff L wrote:
Ok, I came to that conclusion in my edit. It's just not very obvious from the model that the CG is offset.
In keeping with the semi - bizarre, A slip ring (weighted) over the tube could help determine the best cg. it could also be spring loaded and move once cf takes over. getting ahead of myself.
More thoughts....I wonder if they would allow a prop or df driven version, as long as it didn't fly (except on hits)
Also, obviously thetube shape is for convenience. A more aerodynamic shape could help with top speed spinup?????
I'm out of control, I think...
back to basics...once the electroniucs arrives (snail mail) I might giove it a whirl...unless something else comes up
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Wed May 05, 2010 10:50 pm
I've been looking at some of the electronics solutions, and it seems that the accelerometer/gyro method would be the easiest to calibrate. Just make a calibration rig that can chuck into a lathe (which can provide precise and constant RPMs) for final setup before installing it into the robot.
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Wed May 05, 2010 10:56 pm
Actually I am going to start with Rich Olson's recommendations...just to see if it can work.
A few people have had initial success with just tie-wrapping 1 or 2 motors to a plate, using a polulu board, accelerometer, some darlingtons and Rich's code.
the cad above is our version of the cardboard base and zip ties.....
For anyone out of the loop, here is a link to Rich's R & D
http://www.nothinglabs.com/openmelt/
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Wed May 05, 2010 11:19 pm
I think I figured out why the monocopters use an offset prop (or are L or T-shaped): they never seem to exhibit much translational wobble, even on the ground right before takeoff. All the videos of mono-wheeled meltys show they're uncontrolled and drive all over the place until they're past a certain speed.
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Wed May 05, 2010 11:27 pm
The ducted fan version in that video has the actual fan centered, no L shape in any direction.
The more off center the cg is in a melty, the more wobble it seems to have on startup.....until the bot is rotating about its cg, not much control is possible.
Another factor might be that in some cases, the wheel is not oriented correctly to the cg, so it may want to run in an elliptical (or some other) path rather than in a cirdle about the cg.
Not saying that a realworld model of the cad above will actually spin, but so far I am not convinced that it isn't worth a shot....plus it's relatively easy to find out.
Need more input.....
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Thu May 06, 2010 12:01 am
rjw wrote:
The ducted fan version in that video has the actual fan centered, no L shape in any direction.
Nope, I looked again. The ducted fan is still mounted off to one side of the wing.
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Thu May 06, 2010 12:08 am
Jeff L wrote:
rjw wrote:
The ducted fan version in that video has the actual fan centered, no L shape in any direction.
Nope, I looked again. The ducted fan is still mounted off to one side of the wing.
I don't know if we are even talking about the same thing anymore...lol
Here's a pic
left to right, is a counterweight at left, wing at or around cg and the dfan on the other end (right).
SO, outside of the wing, what's different, where's the L, etc.??????
On another note....simply put a plate under my cad and a wok top on top of it and what do you have?
a bot that LOOKS like almost every other melty out there.....do you think that the top or the flat bottom make a difference to the physics of it?
Last edited by rjw on Thu May 06, 2010 12:16 am; edited 1 time in total
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Thu May 06, 2010 12:15 am
The L-shape is to provide torque better, and I think they took care of the wing (based on the fact that it's so light) with a slight offset in the counterweight & motor: ^Like that.
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Thu May 06, 2010 12:18 am
Ah! I think I understand your point, the wing is so light that it doesn't really matter, the counterweight is really what is being pushed. That it doesn't wobble means they've been way more careful with balancing the whole thing than anyone has with a one-wheeled melty so far.
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Thu May 06, 2010 12:22 am
One of us is missing the boat on this....
Look at what you drew...
If the tooth (i.e LOTS OF WEIGHT) was at the wing tip, where do you think the cg would be?
Can we agree that the contraption (for lack of a better word) would rotate about the c of mass..or at least want to?
If so, then that would be one wierd spinning thingie.
In your second picture, it 's the same deal. Only difference is a bend upwards to position the actual prop. and that seems to be done away with in later designs.
Perhaps the prop being up high is due to turbulence that interfered with the airflow over the wing, if it was directly in the props path?
I think that I will go buld the darn thing and just run it off an esc just to see what will happen....it won't translate, but it should at least try to spin
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Thu May 06, 2010 12:28 am
No, I think my last one where I realized that your setup should in fact work finally got there. It's just that I'm trying to find a way to eliminate that obnoxious out-of-control movement all one-wheeled meltys have on startup. It can probably be achieved by a combination of better balancing and a pivot point that is tall enough to contact the ground when stationary/at low speed [therefore keeping the tooth side from dragging on the ground and throwing the whole thing off], but short enough that it lifts completely off the ground at high speed.
rjw Chief Bottle Washer
People Skills : 7968 Registration date : 2009-03-31 Location : Miami
Subject: Re: What about this? Thu May 06, 2010 12:30 am
Jeff L wrote:
Ah! I think I understand your point, the wing is so light that it doesn't really matter, the counterweight is really what is being pushed. That it doesn't wobble means they've been way more careful with balancing the whole thing than anyone has with a one-wheeled melty so far.
Possibly a BINGO
If you look at the video closer, some of the MAV's do wobble, especially initially.
WHen compared to a melty, we have to take weight and balance into consideration. the wing creates lift and gets the much lighter assembly moving/flying/level/balanced, within 1/2 to 2 turns...or so it seems.
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Thu May 06, 2010 1:18 am
Heh. So I'm sort of playing with a few possible antweight layouts, and it turns out that if I choose steel as the primary material, our HAAS CNC mill could do the whole thing as one piece (the whole robot would be a bit under a 6"x6" footprint, probably closer to 5.5"x5.5").
EDIT: oh, and I'd need the wheels going somewhere around 66k RPMs to hit 400 fps
Josh Raichel great contributor
People Skills : 5996 Registration date : 2009-04-30 Age : 34 Location : Bradenville, PA
Subject: Re: What about this? Thu May 06, 2010 1:53 am
In regards to this entire thread.
Jeff L Minister of Silly Walks
People Skills : 6778 Registration date : 2009-03-14 Age : 35 Location : Miami, FL / Atlanta, GA
Subject: Re: What about this? Thu May 06, 2010 2:46 am
Oh, you would've loved my two-week exposition into the development of lighter-than-air battlebots. I still have that stack of papers sitting around somewhere. Especially after the point in time where I realized the only effective weapon they could use would be harpoon guns.
Cody 2000+ club
People Skills : 8015 Registration date : 2009-03-16
Subject: Re: What about this? Thu May 06, 2010 10:11 am
gene had designed(and built?) a bot of the month that looked similar to this, who knows what happened to it