
Battlebots
A new forum for battlebots enthusiasts, competitors, and fans.
|
| | | The Idea Dump |  |
|
+11MikeNCR jeeves_m_d MattTavares Julien Kuzniarek Will Bales That Guy Sean Rubin Dan Curhan Alan Dreher Cody Jeff L 15 posters | |
| Author | Message |
|---|
MikeNCR
super contributor


People Skills : 5845
Registration date : 2009-04-27
Age : 36
Location : Norcross, GA
 |  Subject: Re: The Idea Dump Subject: Re: The Idea Dump  Thu Apr 30, 2009 2:01 am Thu Apr 30, 2009 2:01 am | |
| I'll toss up a few random ideas
Strafing HW rammer
https://2img.net/r/ihimizer/img523/4118/mectrackbv9.jpg
30lb IO concepts. Second one was intended to have a flamethrower.
https://2img.net/r/ihimizer/img201/700/rammernf4.jpg
https://2img.net/r/ihimizer/img85/970/supollyonkz5.jpg
Rather funky drumbot
https://2img.net/r/ihimizer/img246/4876/uberdrumnf9.jpg
30lb concept when it was going to be a LW
https://2img.net/r/ihimizer/img369/3259/ruiner2bti7.jpg
30lb concepts when I decided to build it as a 30lber
https://2img.net/r/ihimizer/img7/5875/ruiner301kc3.jpg
https://2img.net/r/ihimizer/img10/9606/ruiner3012ex2.jpg
https://2img.net/r/ihimizer/img301/4720/ruiner3013oc2.jpg
Solidworks assembly of final version
http://nearchaos.net/MrSD2.png
I use Rhinocerous as a 3d sketching program, so I've got quite a few models of designs in various stages of completion. | |
|  | | rjw
Chief Bottle Washer


People Skills : 7778
Registration date : 2009-03-31
Location : Miami
| | Subject: Re: The Idea Dump Thu Apr 30, 2009 7:03 am | |
| Hey Mike We have a few 15 lbs. variations similar to your wedge/plow bot. I like your funky drum bot...  | |
| | | | Jeff L
Minister of Silly Walks


People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Sun Jun 28, 2009 10:04 pm | |
| I've realized something interesting while I've been working on Infernal Contraption: since the asymmetric drums are so light, you could mount several on a single 120 lb robot. There would be a few things to consider depending on the competition it was entered in though, which boil down to RFL rules vs BotsIQ rules. BotsIQ rules put a 300 fps ceiling on weapons for 120lb robots, so to maximize energy more mass would need to be added to the drums (easy enough to do, just switch from aluminum to steel). However, RFL has a 500 fps ceiling, meaning a greater focus on the weapon's drive. Either way, someone could easily fit two to four asymmetric drums on a single 120 lber, or just add one and use the weight savings for additional armor. | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Sat Nov 21, 2009 12:01 am | |
| Legal [free-flying] Projectile Weapons
Projectile weapons, while potentially very effective against battlebots, are usually nonlegal in competitions based on the danger they pose to crowds by way of damage caused to the arena walls. However, there is no ceiling in place restricting robot speed or acceleration. Therefore, it is likely legal to accelerate a small, heavily-armored multibot up to around the same 300 to 500 feet per second permitted for spinning weapons. Such a system would be comprised of at least two robots, one large 'launcher' and one smaller 'projectile' robot. The larger robot would possess some form of device to launch the smaller one - I currently envision a modified football or baseball launcher filling this role - inside the robot. The projectile robot would drive through an opening in the rear of the launcher, and be shot out the front. | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Sun Jan 24, 2010 10:10 pm | |
| All flamethrower bots are now obsolete. Just put a fine wire mesh over any opening on your robot's armor, and nothing should be able to get through - a reverse davy lamp. | |
| | | | Dan Curhan
Admin

People Skills : 6380
Registration date : 2009-03-14
Age : 32
Location : Sarasota, FL
| | Subject: Re: The Idea Dump Mon Jan 25, 2010 11:52 am | |
| that's totally counterintuitive, but very cool. and i don't know why i never saw your projectile idea, but it definitely made me lol a bit. Someone NEEDS to do that, just to try it.  | |
| | | | rdubard
mega contributor

People Skills : 5945
Registration date : 2009-06-10
Age : 59
Location : Ransom Everglades, Miami, FL
| | Subject: Re: The Idea Dump Tue Jan 26, 2010 6:23 am | |
| I know Mike put his ideas up almost a year ago, but I just now took a look, so. . .
If I'm looking at it right, the 'funky drumbot' is something I've been thinking of for some time==an articulated drum. Specifically, a large drum on a mechanism to allow it to move up and down. It just needs to move enough that the robot can be completely inverted and still operate normally. In fact, it doesn't even have to be powered in this motion, just sort of 'flop around'.
The drumbots I"ve seen are all set up such that only the rear wheels contact the ground when inverted, OR the drum is smaller than the wheels. This way, the drum could be large, but the wheels would always touch.
I dunno if it would work==most likely some of the energy/momentum of a hit would be lost to simply moving that joint. | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Tue Jan 26, 2010 10:32 am | |
| - rdubard wrote:
- I know Mike put his ideas up almost a year ago, but I just now took a look, so. . .
If I'm looking at it right, the 'funky drumbot' is something I've been thinking of for some time==an articulated drum. Specifically, a large drum on a mechanism to allow it to move up and down. It just needs to move enough that the robot can be completely inverted and still operate normally. In fact, it doesn't even have to be powered in this motion, just sort of 'flop around'.
The drumbots I"ve seen are all set up such that only the rear wheels contact the ground when inverted, OR the drum is smaller than the wheels. This way, the drum could be large, but the wheels would always touch.
I dunno if it would work==most likely some of the energy/momentum of a hit would be lost to simply moving that joint. Sort of like this, but with a drum? (the entire weapon assembly sort of "floats," and is held in by a shaft along the back) | |
| | | | rdubard
mega contributor
People Skills : 5945
Registration date : 2009-06-10
Age : 59
Location : Ransom Everglades, Miami, FL
| | Subject: Re: The Idea Dump Wed Jan 27, 2010 5:58 am | |
| Yes. That's the idea--whose bot was that? | |
| | | | Koolaid64
mega contributor

People Skills : 5941
Registration date : 2009-07-05
Age : 33
Location : PA
| | Subject: Re: The Idea Dump Wed Jan 27, 2010 4:53 pm | |
| thats Nuclear Kitten
http://www.etotheipiplusone.net/?page_id=8 | |
| | | | Cody
2000+ club


People Skills : 7825
Registration date : 2009-03-16
| | Subject: Re: The Idea Dump Wed Jan 27, 2010 6:09 pm | |
| charles from team test bot. the same kid who built LOLrio kart, he goes to MIT
other bots:
cold arbor a 30lb SC being built for moto
uberclocker another 30lb SC
test bot (# whatever lol)- 12/15lb flipper
nuclear kitten- 3lb vert disc
pop quiz- 1lb horiz. overhead spinner
I like to stay up to date on his projects through his website. He's extremely smart and comes up with some crazy ideas, not just in combat robots | |
| | | | Will Bales
ULTRA contributor

People Skills : 6176
Registration date : 2009-03-15
Age : 31
Location : Miami, FL
| | Subject: Re: The Idea Dump Wed Jan 27, 2010 11:09 pm | |
| yeah, like an electric shopping kart. | |
| | | | Dan Curhan
Admin
People Skills : 6380
Registration date : 2009-03-14
Age : 32
Location : Sarasota, FL
| | Subject: Re: The Idea Dump Thu Jan 28, 2010 10:09 am | |
| he's a freaking genius lol. And an entertaining writer... :] | |
| | | | Koolaid64
mega contributor
People Skills : 5941
Registration date : 2009-07-05
Age : 33
Location : PA
| | Subject: Re: The Idea Dump Thu Jan 28, 2010 1:54 pm | |
| on the subject of the funky drum bot, i have a design from like a year ago for a three pound shuffle bot. again its from like a year ago and i would have to update the crap out of the design if i wanted to build it 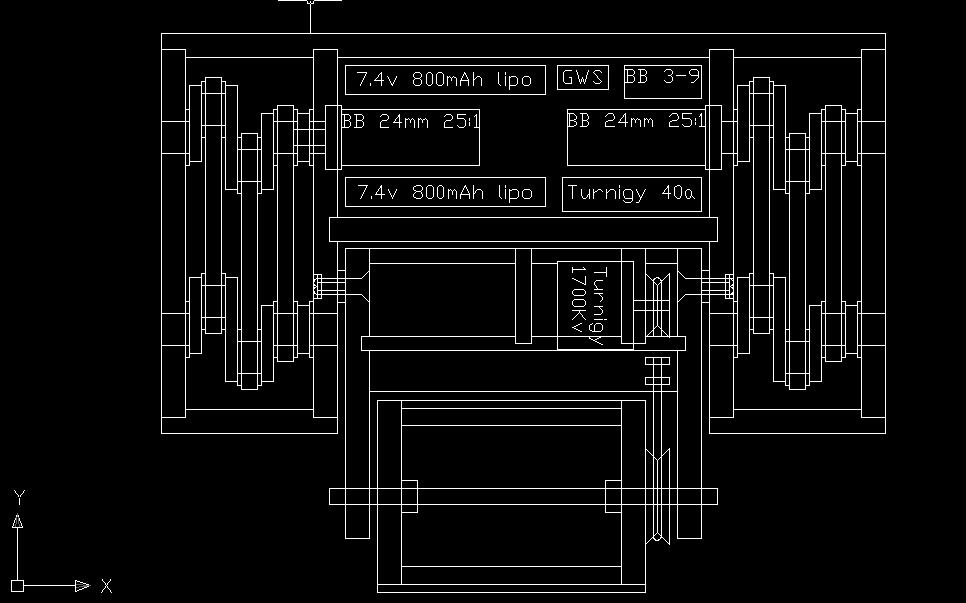 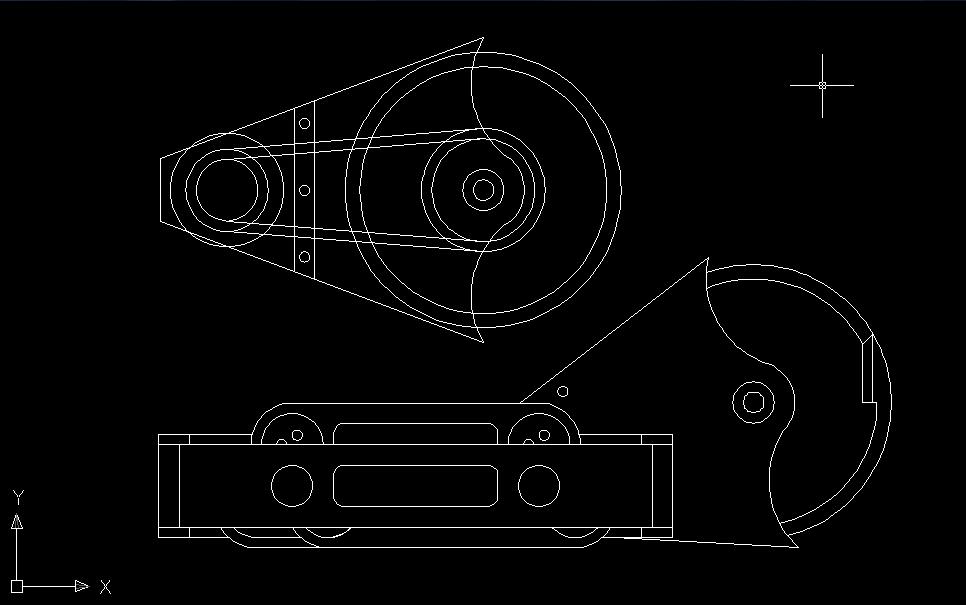 | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Thu Jan 28, 2010 2:31 pm | |
| Looks pretty decent, all I'd add is a radial slot along the walls that hold the drum itself and have a post pass through them. That would add one extra constraint to prevent some unwanted motion while still allowing the whole assembly to move through the desired path. | |
| | | | Koolaid64
mega contributor
People Skills : 5941
Registration date : 2009-07-05
Age : 33
Location : PA
| | Subject: Re: The Idea Dump Thu Jan 28, 2010 2:40 pm | |
| i though i had a limit in that design, looking at it now i guess not. i remember putting it in a design must be a different one i guess | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Sun Apr 18, 2010 1:16 am | |
| Computer-Assisted Driving:
Some of you here are familiar with using macro commands on computers to rapidly execute an otherwise difficult/tedious combination of keystrokes (this is often used in computer gaming to do some pretty crazy things). From my experience with X-Contamination*, a robot that up until the last year or two of operation had its own on-board micro controller, I think this concept could be applied to battlebots as well. Example: imagine if a drum robot was equipped with an arduino micro controller along with the standard transmitter package, and maybe one or two sensors. Everything on that robot functions normally [the same as any other without a micro controller], except that you can turn on an assisted attack mode: if given a specific signal from the receiver, a program on the arduino automatically causes the robot to move forward at the ideal speed relative to its own drum RPM and the target velocity. So, the controls would work as follows: one channel turns the drum on, two channels control the drive, and one other channel tells the arduino to automatically "optimize" and execute the attack based on a range finder and RPM sensor [to improve the chances of a best-case hit]. This is not only limited to attacks but could possibly be used for complicated maneuvers to dodge an attack.
*X-Contamination had several mixing programs on its micro controller, one of which changed its driving characteristics and another which automated and changed the arm functions. | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Wed Oct 20, 2010 3:42 pm | |
| I've had this thought before (MANY years ago), but now I think I finally have a good application it could be used in:
Machined Integrated Wiring
The basic concept is as follows: instead of using flexible wires for the transmission of electricity throughout a bot, machined (milled/laser cut/water jetted/etc) copper or non-alloy aluminum sheet is used. In spite of being more work to get right (parts would need to be almost EXACTLY placed, with only short wires to jump from components to the assorted supply & ground sheets) and harder to make major repairs, you get a few unique advantages:
1. You could potentially make very, very thin or compact robots.
2. In spite of the additional work involved, wire volume and weight can be better taken account of during CAD modeling.
3. You can find the moment of inertia of your wiring - which could be handy for MELTY-style translational spinners.
That you can use the model to assist in the design of a MELTY is where I thought the biggest plus was. Still, it's not what I would call easy and I'm not entirely sure if it's the best option for ensuring translational spinners are better balanced (or anything else really). Outside of that, the only area it would probably help is in making very thin robots (ex: something with a 1/4" to 3/8" [or less!] tall chassis at its thinnest points that still have some kind of electrical component stuck inside).
And yes, the sheets would need to be insulated; something like a thin coat of epoxy or several layers of spray paint would probably do the trick. | |
| | | | rickrust

People Skills : 4962
Registration date : 2010-10-18
| | Subject: Re: The Idea Dump Wed Oct 20, 2010 7:08 pm | |
| - Jeff L wrote:
- I've always started a thread like this on my team's previous (and now defunct) forums. This is pretty much where people can submit completely crazy, new ideas and have them critiqued and further developed by their peers. It basically served as our "Skunk Works" where we tried to come up with things to out-innovate other teams. Also, since I was our "Idea Guy", it was a place to put everything I thought of so I could keep track of it.
Counter-Rotational Spinning Weapons, aka CRS Weapons
Our work with this concept started waaaay back in fall '05. Coriolis was the intended prototype robot, but due to complications with the design it had to be severely cut back to a mediocre vertical circular saw robot. The benefit of CRS weapons is that the counter-rotation negates any gyroscopic effects from sharp turns, resulting in extremely nimble & easy to control robots with powerful spinning weapons. The other hypothetical benefit is increased damage in the form of shearing; the primary configuration it was intended for was two vertical spinning disks, placed one disk thickness away from the other. When the two disks struck a target, the idea was that it would wrench the material very sharply in two different directions, resulting in a large tear in the material.
The current progress with CRS weapons is still on the drawing board. However, I still feel that one could be made without too much trouble. I think you could probably use a square framed beater, (like the one from Locano,) and a drum inside it going in the opposite direction, and had the same wheight. I know it would waste both energy, and weight, but it would be more much faster and nimbler. | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Wed Oct 20, 2010 10:29 pm | |
| - rickrust wrote:
- Jeff L wrote:
- I've always started a thread like this on my team's previous (and now defunct) forums. This is pretty much where people can submit completely crazy, new ideas and have them critiqued and further developed by their peers. It basically served as our "Skunk Works" where we tried to come up with things to out-innovate other teams. Also, since I was our "Idea Guy", it was a place to put everything I thought of so I could keep track of it.
Counter-Rotational Spinning Weapons, aka CRS Weapons
Our work with this concept started waaaay back in fall '05. Coriolis was the intended prototype robot, but due to complications with the design it had to be severely cut back to a mediocre vertical circular saw robot. The benefit of CRS weapons is that the counter-rotation negates any gyroscopic effects from sharp turns, resulting in extremely nimble & easy to control robots with powerful spinning weapons. The other hypothetical benefit is increased damage in the form of shearing; the primary configuration it was intended for was two vertical spinning disks, placed one disk thickness away from the other. When the two disks struck a target, the idea was that it would wrench the material very sharply in two different directions, resulting in a large tear in the material.
The current progress with CRS weapons is still on the drawing board. However, I still feel that one could be made without too much trouble.
I think you could probably use a square framed beater, (like the one from Locano,) and a drum inside it going in the opposite direction, and had the same wheight. I know it would waste both energy, and weight, but it would be more much faster and nimbler. Actually, I think Will Bales looked into something similar with conventional drums - I don't remember hearing about it getting very far along though. | |
| | | | rickrust
People Skills : 4962
Registration date : 2010-10-18
| | Subject: Re: The Idea Dump Thu Oct 21, 2010 4:55 pm | |
| well, after thinking about it, you have two choices,
1) have something that weighs the same as a weapon, spinning at the same rate
2) or have two equal weapons, that go in opposite directions, which would be less effective as one, that weighed much less. | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Thu Oct 21, 2010 6:03 pm | |
| or 3) have a weapon, and then an object which shares a common center of gravity with the weapon spinning at just the right rate to balance all the forces from the weapon to 0. | |
| | | | Cody
2000+ club
People Skills : 7825
Registration date : 2009-03-16
| | Subject: Re: The Idea Dump Thu Oct 21, 2010 7:49 pm | |
| im pretty sure that is what he was just describing...... | |
| | | | Jeff L
Minister of Silly Walks
People Skills : 6588
Registration date : 2009-03-14
Age : 35
Location : Miami, FL / Atlanta, GA
| | Subject: Re: The Idea Dump Thu Oct 21, 2010 8:19 pm | |
| nope, because you can have a lighter object that spins much faster and get the same effect. | |
| | | | rickrust
People Skills : 4962
Registration date : 2010-10-18
| | Subject: Re: The Idea Dump Wed Nov 10, 2010 7:17 pm | |
| - Jeff L wrote:
- Kinetic Energy Batteries
Ever since we saw the first video of Warrior SKF, a Team Whyachi robot, we wanted to make our own version. Warrior SKF is a spinner that can harness the stored energy in its spinning ring to activate a flipper, throwing heavyweight robots six feet into the air (or more). The advantages of such a design are obvious: all the power of spinning weapons, with the precise control of spring/pneumatic/electric weapons. Our first attempt was X-Revolution, which used a three pound section off of some part of a jet engine as the spinning shell. It was also to use a flipper, which was a variant of X-Contamination's own flipper. Unfortunately, since we didn't have any good way to lock the flipper into the shell, it didn't work.
More recently, I've put some work into the concept and have something sitting in CAD that I think would work properly. It's a drum enclosed inside the robot, with a shaft that comes into contact with it and is pushed linearly (I'll find some screen shots and put them up here to clarify). The main disadvantages with my design are the potential for the shaft to break (I have no idea whether it would be able to hold up to being struck by the drum), complexity of the whole assembly (it requires a small microcontroller and sensors to properly time its operation), and the assembly's size. Still, I think it has a reasonable chance of working. How exactly would that work? how would you get the the spinner to hit the shaft, my idea is have a chain going really fast, and have a gear on another chain system hooked up to the flipper, and have that snap into the chain. Im sorry if this really vague, but it is kindof hard to explain. Also, does anyone have any alternatives to wheel postitions besides the 2 or four wheel drive that is common? | |
| | | | Sponsored content
| | Subject: Re: The Idea Dump | |
| |
| | | | | | The Idea Dump | |
|
Similar topics |  |
|
| | Permissions in this forum: | You cannot reply to topics in this forum
| |
| |
| |
|






